

Erilaiset IoT-ratkaisut yleistyvät kovaa vauhtia. Uusi teknologia ja sen hyödyntäminen on usein houkuttelevaa, mutta hankintoja tehdessä, on hyvä pysähtyä miettimään, mitä lisäarvoa teknologia tuo tullessaan ja mihin sitä todellisuudessa tarvitaan. Kokosimme muutamia asioita, joiden avulla voit pohtia miten langaton kunnonvalvontajärjestelmä auttaa kunnossapidossa ja mitä asioita hankinnassa kannattaa ottaa huomioon.
Usein kunnonvalvontajärjestelmät hankitaan erityisesti laakereiden kunnonvalvontaan, sillä suurin osa pyörivien koneiden vikatilanteista liittyy laakereihin. Tämä ei johdu siitä, että laakerit olisivat huonoja, vaan siitä, että kaikki voimat kulkevat laakerien kautta. On perusteltua odottaa, että kunnonvalvontajärjestelmä havaitsee laakereiden kulumisen ja vikaantumisen luotettavasti. Tässä opuksessa ei perehdytä vikojen analysointiin, sillä se vaatisi jo satoja sivuja tekstiä.
Kunnonvalvontajärjestelmän pääasiallinen tehtävä on kerätä dataa analysointia varten. Analysointia tekee usein ihminen, mutta myös karkeaa automaatiota ja tekoälyä voidaan hyödyntää. Automaation tai tekoälyn varaan ei nykyisellä olemassa olevalla teknologialla kannata koneiden valvontaa vielä jättää. Ei väliä kuka tai mikä analysoi, mutta analysointiin vaaditaan aina korkealaatuista dataa antureilta. Kunnonvalvonta-antureiden tehtävä on tuottaa analysointiin tarvittavaa tietoa, joten kokoamme tähän mitä teknisiä ominaisuuksia antureista ja järjestelmistä tulee löytyä luotettavaa vikojen tunnistamista ja analysointia varten:
Mittausalue/dynaaminen alue
Mittausalue ilmoitetaan g-arvoina ja kertoo, kuinka suuria kiihtyvyyksiä g-arvoiksi muutettuna anturi maksimissaan kykenee mittaamaan. Tämä ei kerro mitä anturi fyysisesti kestää, vaan ainoastaan sen mitä voidaan mitata. ISO 20816 standardin värähtelyn raja-arvojen kattamiseen riittää noin 10g dynaaminen alue. Useimpiin kunnonvalvonnan kohteisiin 10g riittää varsin hyvin, mutta jos kuitenkin epäilet että laitteen tulisi mitata suurempia kiihtyvyyksiä, kysy myyjältä suuremman dynaamisen alueen kiihtyvyysanturia.
Taajuusalue
Nopeuden tehollisarvon eli kokonaistason mittaus tehdään yleensä taajuusalueella 2 – 1000Hz tai 10 – 1000Hz. Tällä menetelmällä voidaan seurata koneen yleistä värähtelyä ja sen perusteella nähdä milloin värähtelyn kokonaistaso on noussut. Kokonaistaso kertoo siis yleistä tietoa koneen värähtelytasosta, mutta sen perusteella ei voida selvittää mistä vika johtuu (värähtelyn kasvulle on aina olemassa juurisyy). Analysointia ei pelkällä tehollisarvolla voi suorittaa, mutta sen seuranta on helppoa yhden tunnusluvun vuoksi.
Taajuusanalyysi on tehtävä aina, kun halutaan selvittää mistä koneessa havaitut poikkeamat johtuvat. Laakeriviat tuottavat aluksi heikkoa ja korkeataajuista värähtelyä, joka peittyy korkeampiamplitudisien värähtelyjen alle. Laakerivioista johtuva värähtely näkyy verhokäyrä- tai PeakVue-analyysissä huomattavasti aiemmin kuin kokonaistason kasvuna. Anturin tulisi mitata vähintään 3000-5000Hz taajuuksia, jotta alkavat laakeriviat voidaan havaita, esimerkiksi verhokäyrämittauksissa.
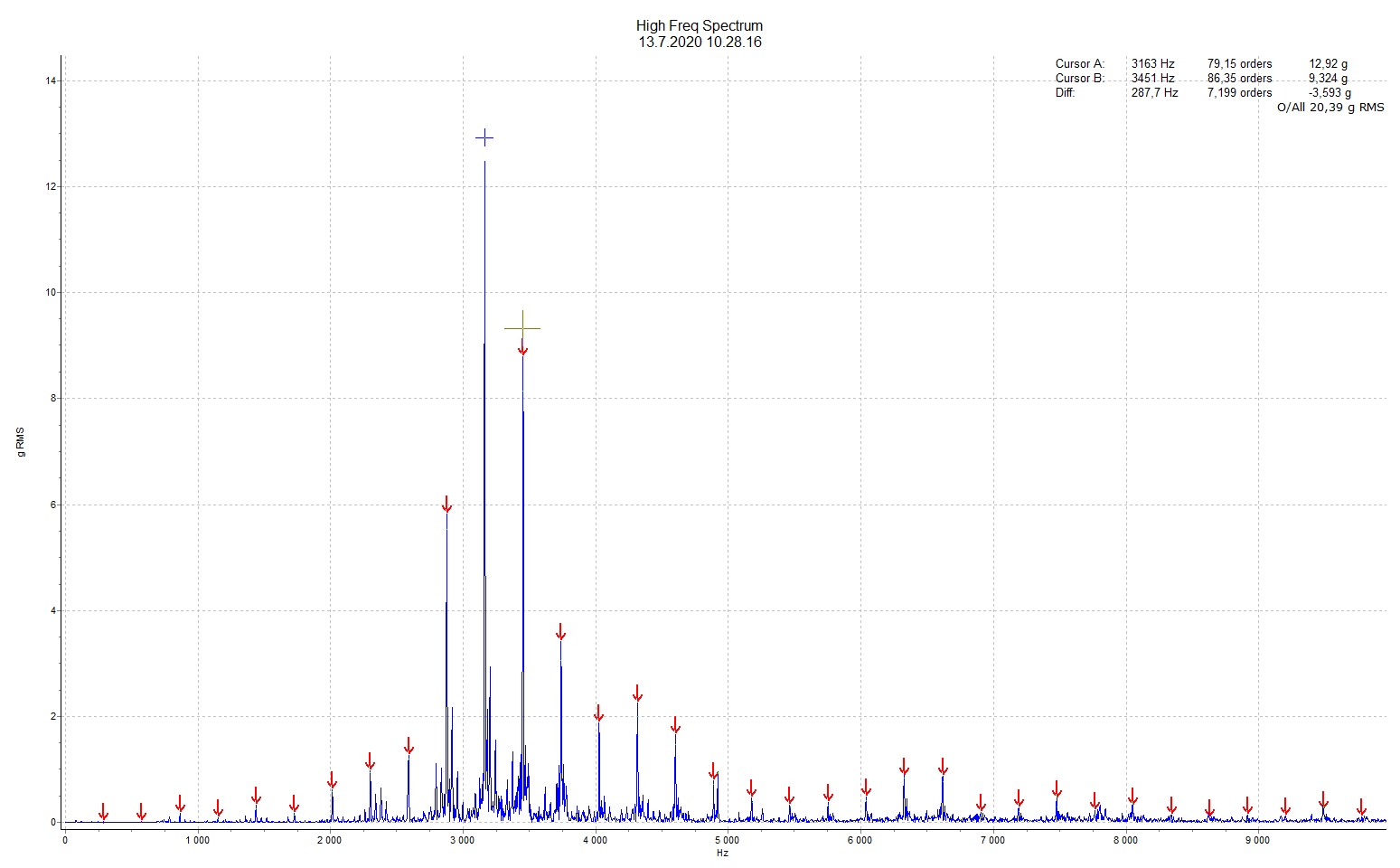 Kuvassa esimerkki siitä millä taajuuksilla laakerivauriot yleensä havaitaan. Kuvan laakerivaurio on jo pitkälle kehittynyt, joten se näkyisi mahdollisesti myös kokonaistasoa mitattaessa.
Kuvassa esimerkki siitä millä taajuuksilla laakerivauriot yleensä havaitaan. Kuvan laakerivaurio on jo pitkälle kehittynyt, joten se näkyisi mahdollisesti myös kokonaistasoa mitattaessa.
Resoluutio
Resoluutio kertoo millä tarkkuudella voidaan lukuarvoja erotella. Korkeampi resoluutio mahdollistaa pienenpien amplituditasojen erottamisen kohinan seasta. Kunnonvalvonnan kannalta yleisesti 16bit on pienin riittävä resoluutio, jolla järjestelmä tulisi mitata.
Näytteistystaajuus
Näytteistystaajuus määrittää kuinka korkean taajuuden voi esittää. Nyquistin teoreeman mukaisesti näytteenottotaajuuden tulee olla vähintään kaksinkertainen näytteistettävään signaalin taajuuteen verrattuna. Jos siis järjestelmä näytteistää 10 000Hz taajuudella, siitä saadaan 5 000Hz näytteistettyä signaalia. Käytännössä mitä korkeampi näytteistystaajuus, sen parempi kunnonvalvonnan kannalta. Korkea näytteistystaajuus vaatii kuitenkin laskentatehoa ja voi nostaa mittauslaitteistojen hintaa ja kuluttaa langattomien anturien akkuja.
Standardin mukaiset mittaukset
Iso standardit esimerkiksi ISO 20816 ja 10816 antavat raja-arvoja sallituille värähtelytasoille. Raja-arvot liittyvät yleensä enemmänkin koneen turvalliseen käyttöön kuin vikojen ennakointiin, koska ne ottavat kantaa vain värähtelyn kokonaistasoihin. Standardit antavat kuitenkin hyvän perustan esimerkiksi hälytysrajojen asettamiseen. Pelkkä kokonaistasomittauskin lisää luotettavuutta ja vähentää yllättäviä laiterikkoja. Lisäksi kokonaistasoja mittaavat järjestelmät ovat usein edullisia ja helppoja kytkeä automaatioon. Kynnys järjestelmän toteuttamiseksi on siis pieni. Kokonaistaso mittauksiin löytyy sekä kokonaistasoantureita että signaalinmuuntimia, jotka muuttavat mitatun värähtelyn aikatasosignaalin tyypillisesti esimerkiksi lineaariseksi nopeuden tehollisarvoksi. Osaava kunnonvalvontatuotteiden edustaja/valmistaja pystyy auttamaan oikeiden anturien valinnassa ja signaalien konfiguroinnissa niin että asetukset on valmiiksi oikein tehty ja asiakkaalle jää vain asennus ja kytkentä automaatioon.
EX-alueet
Lähes kaikilta kiihtyvyysantureiden ja kunnonvalvontajärjestelmien toimittajilta löytyy EX alueille sopivat tuoteperheet. Tilaluokat ja sovellettavat standardit on hyvä ilmoittaa toimittajalle jo ennen tilausta, jotta yhteensopivuus voidaan varmistaa.
Muuta:
Puhuimme tässä lähinnä anturin ominaisuuksista. Kokonaisen järjestelmän hankintaan liittyy muutakin. Ohjelmistot, tallennustila, lisenssit ym. saattavat vaikuttaa paljonkin järjestelmien kokonaiskustannuksiin. Kysy tarjousvaiheessa, paljonko lisäkustannuksia näistä tulee tuotteen elinkaaren ajalla ja kuinka pitkiä sopimukset ovat.
Jos haluat kysyä enemmän langattomista kunnonvalvontajärjestelmistä, ota meihin yhteyttä puhelimitse, sähköpostilla tai lomakkeen avulla yhteystietosivullamme